
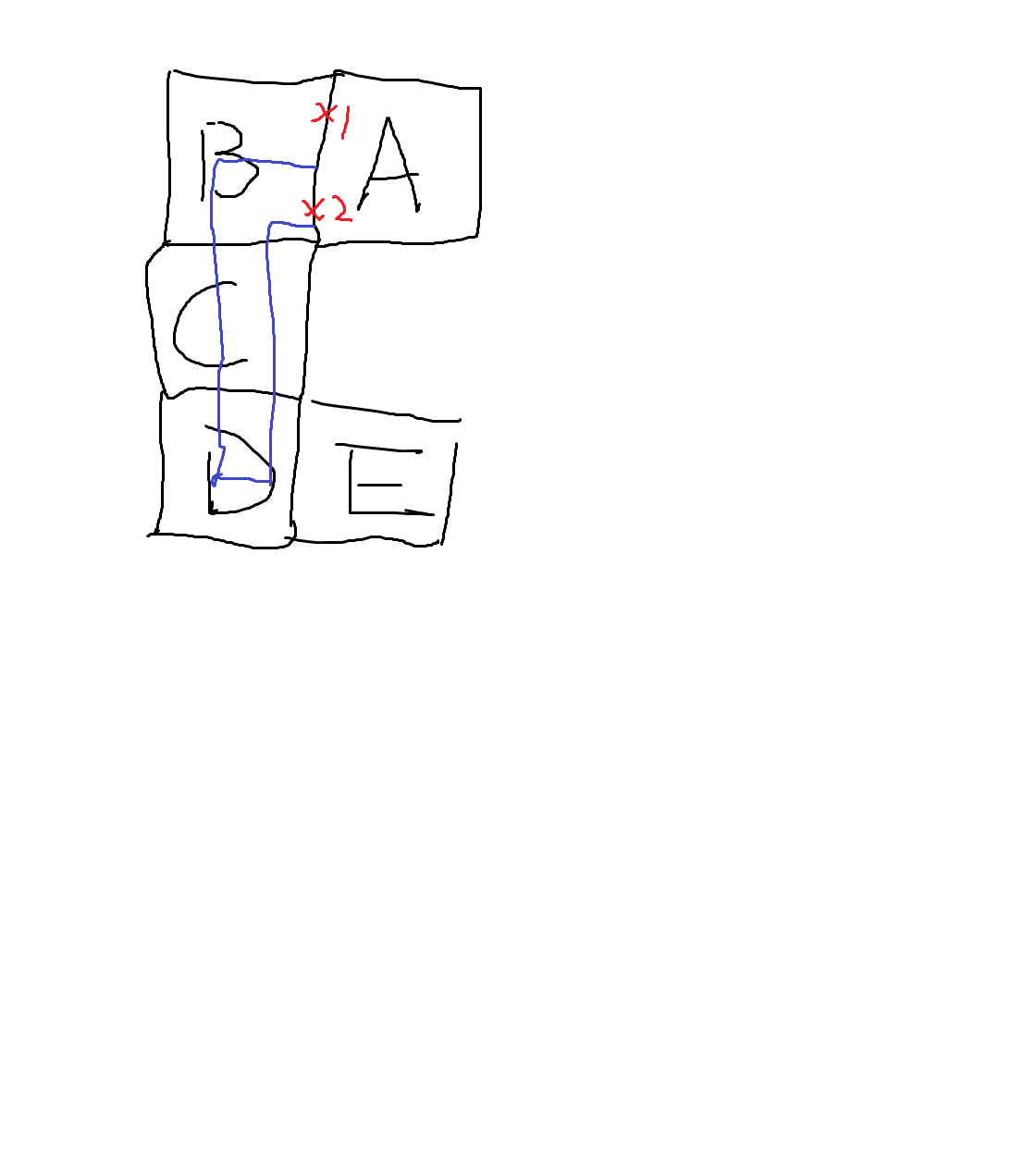
Let's say, on abstract level, the path, namely, A->B->C->D->E is valid, but the agent must choose portal #1 to reach E.... Presumably the agent has chosen portal #2, and go to B, C and D and finally ending up finding itself getting stuck at D and cannot move over to E... The whole computation is wasted. How do I avoid this problem?
thanks
Jack







