
hplus0603 said:
Yeah, well, my kids will jam the couch even closer to the wall to make more space for the Valve Index, and here we are again :-)
That's why my factory makes smaller and smaller robots. They even have sensors to dodge VR-Goggle-kids so they don't tumble over the robot.
BTW, i always wanted to know if room scale VR goggles is a safety risk for kids (or grown ups too), so if you can talk? : )
To defend my TS algorithm, i would handle narrow dead end passages with preprocessing the graph, so a vertex on the passage entry is duplicated. Requires also to duplicate edges, and probably i'd also need to ensure they do not cross each other:
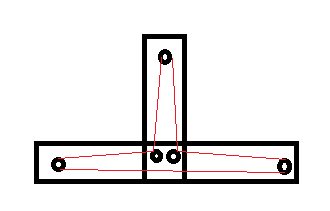
TS would still give a working and optimal solution then, without awareness of going forth and back or crossing the same space twice.
I had to do this once for mesh processing. Multiple paths could cross the same edges of the mesh, and keeping it in order so crossing is prevented was a nightmare to implement. But it worked.








